
АМЕРИКАНСКИЕ МАРСОХОДЫ.
В 2003 г. NASA планирует направить на Марс два одинаковых исследовательских марсохода Марс Эксплорэйшн Ровер (Mars Exploration Rover), которые должны быть запущены 30 мая и 27 июня 2003 г. Посадки их на поверхность Марса произойдут, соответственно, 4 января и 8 февраля 2004 г. Пуск двух станций значительно увеличивает шансы на успех и в наиболее благоприятном случае - позволит исследовать сразу два района Марса. В качестве кандидатов в таковые были предложены:
Из одного только этого подбора мест видно, что наибольший интерес для планирующих исследовательские программы людей представляют районы, где могут быть обнаружены следы воды. Цели каждого робота-вездехода - фотографирование поверхности, исследование химического состава поверхности и ее геологического строения, поиск следов воды, исследование климатической и геологической истории данного участка поверхности Марса. Перед роверами не стоит задача поиска жизни на Марсе, но они будут заниматься
Марсоходы имеют массу по 150 кг каждый, срок их работы расчитан на время от 3 до 6 месяцев, при этом марсоходы будут способны проходить до 100 м в сутки. Напомним, что маленький марсоход Pathfinder в 1996 г. отъехал от спускаемого аппарата на расстояние всего около 10 м. Инструменты миссии - камеры, спектрометры, и другие датчики, которые позволят измерять и изучать параметры окрестностей места прохождения марсоходов. Каждый из них "вооружен" не менее чем девятью камерами и тремя спектрометрами. Некоторые из инструментов предназначены для научных целей, в то время как задачами других является снабжение центра управления роверами информацией, согласно которой их будут вести сквозь препятствия марсианского ландшафта. Среди инструментов - панорамные камеры, микроскопы, спектрометр Мёссбауэра, манипулятор с пятью степенями свободы и шлифовальным устройством RAT (Rock Abrasion Tool), которое должно послужить для удаления ржавчины с исследуемых образцов на участке диаметром 45 мм.
Управление марсоходами будет осуществлять команда из приблизительно 100 человек. Большая часть работы команды придется на то время, когда роверы приблизительно 14 часов в день "спят", в это время данные, полученные при движении и исследовательских акциях роверов будут обрабатываться и интерпретироваться. На основании полученных результатов, команда будет выстраивать тактику дальнейших действий для роверов, на время их "пробуждения".
При разработке марсоходов большое внимание уделено двигательной системе. Каждое из шести колес ровера имеет независимый двигатель. Пары передних и задних колес имеют по регулирующему двигателю, которые позволяют роверам поворачиваться на месте. Регулирование четырьмя колесами позволяет роверу отклоняться и изгибаться в процессе поворотов.
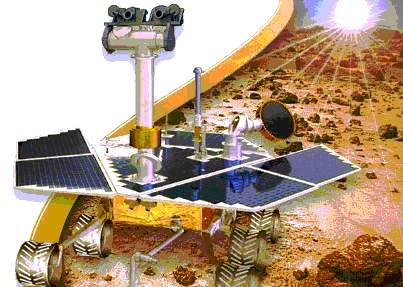
Перед вами фото, изображающее марсоход, которое, помимо всего прочего, позволяет оценить его размеры относительно человеческого роста.
На фотографиях МЕR видна мачта, на которой расположены панорамные Для взятия проб и анализа состава камней и почвы предусмотрена автоматизированная робототехническая рука с плечом, локтем, и запястьем. Рука позволяет ученым разместить набор четырех инструментов под точно выверенным углом против выбранной скалы или камня. Рука каждого марсохода оснащена средством измельчения горных пород (Rock Abrasion Tool, RAT) с алмазными резцами. Они позволят впервые за все время исследований Марса проникнуть в недра планеты.
Возможность изучить горные породы на Марсе даст геологам возможность понять их строение и механизм происхождения, а также получить новые данные о процессе эволюции на Марсе. Перемещаясь по Марсу, марсоходы будут находить интересующие их горные породы, после чего с помощью манипуляторов придвинут к интересующему их участку поверхности рабочую поверхность системы измельчения RAT, которая в течении 30 минут cнимет верхний слой горных пород, оставив круглое отверстие в породе диаметром около 45 мм и глубиной 5 мм .
После этого обнажившиеся горные породы будут исследованы с помощью видеокамеры и химических анализаторов. RAT рассчитан на однократное использование, однако способен измельчить породу на десяти тестовых площадках.
Для посадки планируется использовать надувную конструкцию, которая была успешно испытана во время миссии аппарата Mars Pathfinder в 1996 г. Основное торможение будет осуществлено с помощью парашюта, непосредственно перед контактом с поверхностью сработают двигатели посадки и будут раздуты воздушные камеры. После достижения поверхности, космический корабль подпрыгнет на них дюжину раз, и сможет прокатиться до одного километра. Когда он остановится, воздушные камеры будут скачаны и отделены, лепестки откроются, приводя примарсившийся аппарат к вертикальному положению.
Вот на данный момент времени вкратце вся информация от "Красной Планеты" о этом интереснейшем проекте ( точнее проектах , ведь марсоходов будет два ). В дальнейшем, по мере претворения планов в жизнь, мы постараемся освещать этот процесс в нашем журнале. Будем надеяться на удачное осуществление миссий Марс Эксплорэйшн Роверов! 26 Августа, 2003 Исследование Марса самоходным аппаратом. Марсоход на Марсе по представлению художника (рис. справа внизу) На пути к Марсу NASA произвел отладку научной аппаратуры и привязку камер на Spirit и Opportunity и оценил работоспособность приборов после нагрузок и вибраций при запуске этих двух аппаратов. Тестовые измерения в Лаборатории реактивного движения (Pasadena), завершились с положительными данными о работе и возможностях двух спектрометров.
Научная аппаратура включает в себя панорамную стереокамеру, микроскоп и три спектрометра. Тесты также оценили работоспособность каждой камер космического корабля. Все 10 камер - три камеры для научных исследований и семь прикладных камер показали хорошие результаты при тестировании. Один из трех спектрометров (Spirit) прошел тест неверно. Другие два спектрометра работали правильно. Тестирование началось почти три недели тому назад, и за это время было проанализировано около 200 мегабайт данных переданных с каждого космического корабля.
"Все камеры работают нормально," сказал Dr. Justin Maki. "Всего мы получили 14 изображений с каждого космического корабля. Титры на изображениях дают характерные подписи, которые сообщают, что электроника работает правильно."
Научные камеры на марсоходах - "Pancam" для цветных панорамных съемок и блоки Microscopic для формирования изображения - все работает безукоризненно. Спектрометры на марсоходах для анализа минералов на расстояния, также работают нормально. Два других спектрометра - спектрометра альфа-частиц и спектрометр Mossbauer - установлены для определиния состава грунта. Оба инструмента , а также приемнк альфа-частиц рентгеновского спектрометра работают нормально. Спектрометр Mossbauer на Spirit - единственный, чьи данные теста не дали ожидаемого нормального функционирования.
Сopyright 2002-2023 © Сайт "Галактика" • Проект "Астрономическая энциклопедия" • Идея, дизайн, хостинг, веб-мастер сайта - Кременчуцкий Александр, Москва. |
 исследованиями окружающей среды места посадки, в том числе и на предмет ее возможности поддержания жизни в какие-то прошлые времена, когда климат возможно был мягче..
исследованиями окружающей среды места посадки, в том числе и на предмет ее возможности поддержания жизни в какие-то прошлые времена, когда климат возможно был мягче.. Двигательная система ровера разработана таким образом, чтобы при наклоне в 45 градусов в любом направлении избежать угрозы опрокидывания.
Двигательная система ровера разработана таким образом, чтобы при наклоне в 45 градусов в любом направлении избежать угрозы опрокидывания. и навигационные камеры, мачта позволяет поднять их на высоту 1,4 метра от уровня земли, увеличивая таким образом видимую перспективу поверхности Марса.
и навигационные камеры, мачта позволяет поднять их на высоту 1,4 метра от уровня земли, увеличивая таким образом видимую перспективу поверхности Марса. 
